Policy Gradient Methods
Policy Gradient Methods
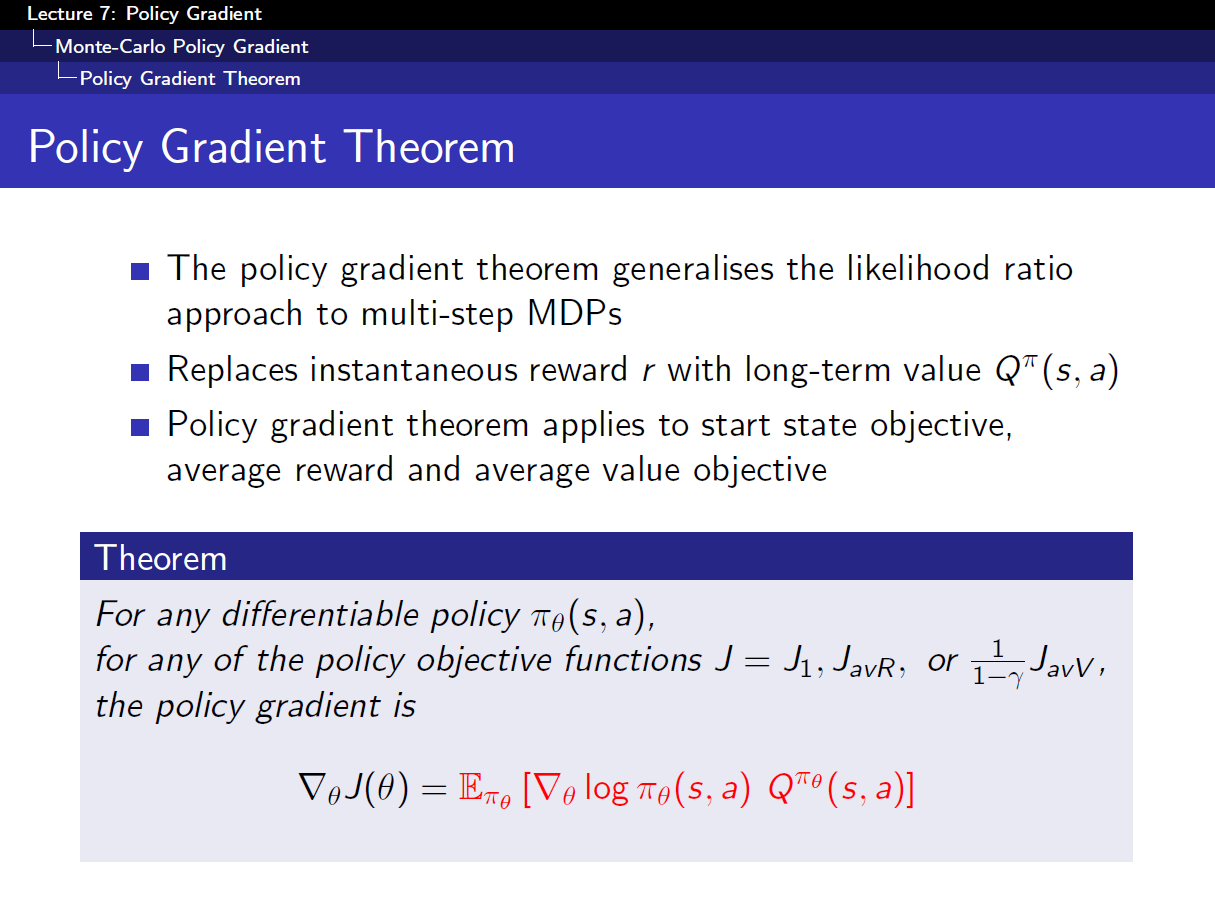
In summary, I guess because 1. policy (probability of action) has the style:, 2. obtain (or let's say 'math trick')
in the objective function (
i.e., value function
)'s gradient equation to get an 'Expectation' form for
:
, assign 'ln' to policy before gradient for analysis convenience.
Notation
J(θ): any policy objective function of θ (vector).
: step-size parameter.
: policy gradient.
: ascending the gradient of the policy.
: action policy.
Usually, probability of action looks like:
(a)
Soft-max policy, weight actions use linear combination of features x
or
(b)
continuous action, Gaussian distribution policy
so
so
We get score function .
For (a)
For (b)
The results are the same as the equations at the page 336 from Chapter 13. Policy Gradient Methods. Reinforcement Learning: an introduction, 2nd, Richard S. Sutton and Andrew G. Barto.
For one-step MDPs:
For any of the policy objective functions:
so
so, we get algorithm for updating θ:
In summary, I guess because 1. policy (probability of action) has the style: