Hierarchical Apprenticeship Learning, with Application to Quadruped Locomotion
Hierarchical Apprenticeship Learning, with Application to Quadruped Locomotion
本论文关键在于机器狗走路经过崎岖路面到达goal的特殊性决定了比较方便选low-level:四条腿,与地面接触,high-level:整体重心,与goal直线距离(关于专家建议)。后面有分析。
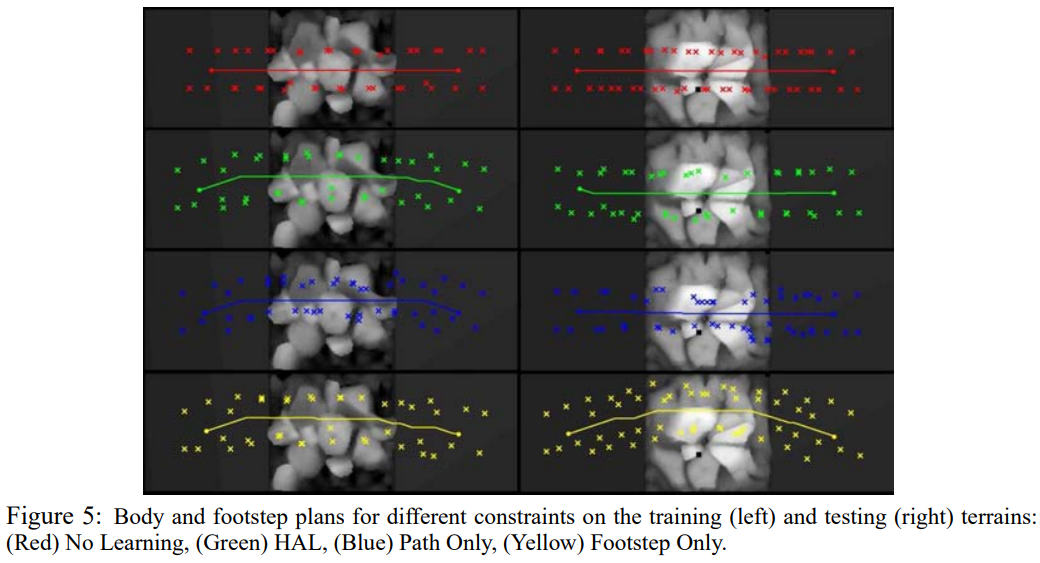
图5表明机器狗的足迹,学习前和学习后差别很大,只用footstep约束(四条腿)会使机器狗走弯路,我理解是四条腿更关心路面的崎岖程度,哪里更不容易卡住或者摔倒就走哪里,而body path planner计划机器狗重心近似轨迹(在terrain上方)到goal,可以理解成path更关心到goal的直线距离。

机器狗在测试terrain中只从path-level demonstration过不去,也就是说如果只关心机器狗重心到goal的直线距离而不关心4条腿与地面接触就不能到达goal,因为机器狗会在路面上摔倒或者卡住。