Hand Rehabilitation devices
The advancement of technology has brought about numerous devices aimed at the rehabilitation of fine motor skills. One such device is the Phantom Premium 1.0 which is a commercially available haptic device which allows you to create a virtual haptic environment. Youn. K et al. used this device as a pen holder which allows the user to select any character they wanted to work on and guides their hand onto the right track if they deviate. (Kim & Yang, 2006)
The MIT-MANUS device is used to provide robotic therapy in order to gain more functionality in the upper arm. This device was developed to address the need for a low-impedance robot that was backdrivable. The patient grips the end effector of this device and is led through exercises that have visual feedback on a computer as well as haptic feedback.

MIT-MANUS (courtesy of MIT)

Phantom Premium 1.0 (courtesy of Geomagic)
Cable Driven Systems
One example of a cable-driven rehabilitation system is the Multi-Axis Cartesian-based Arm Rehabilitation Machine (MACARM) project. This is a cable robot for upper limb rehabilitation. The configuration is comprised of an array of 8 motors mounted at the corners of a cubic support frame that provides, via cables, 6 degree of freedom (DOF) control of a centrally located end-effector. A 6 DOF load cell mounted on the end-effector provides force measurement. (David Mayhew, 2005)
Another example is a CDDR (Cable-Direct-Driven Robot) developed by Ohio University. Their goal was to improve the serious cable interference problem with existing CDDRs and to avoid configuration where negative cable tensions are required to exert general force on the environment. They determined that the four-cable system required less energy but that the three-cable system had smaller tracking error. (Williams, PLANAR CABLE-SUSPENDED HAPTIC INTERFACE: DESIGN FOR WRENCH EXERTION, 1999)
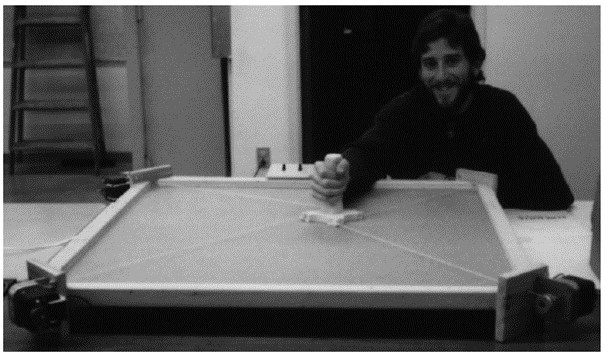
PLANAR CABLE-SUSPENDED HAPTIC INTERFACE
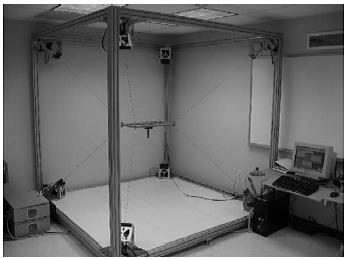
MACARM (Courtesy of IEEE 2005)