Hand-writing Rehabilitation in the Haptic Virtual Environment is the main driver behind our claim that this senior design project has a medical application. This paper has advantages over the period art because it is a Haptic device, not a position control device. That is, the user is helped through the process, not forced through. This plan uses a bulkier Phantom Premium 1.0 instead of cable. There is a possibility that the lighter design of a cable driven system will enhance this paper’s results as the system will have less inertia to fight.
In order to calculate the guiding force, they assume the pen does not have friction on the surface. We can not make that assumption with our system since our pen is interacting with a physical surface. They needed a different approach for English letters that were curved and English letters that were made of straight lines. The straight characters are treated like a traditional virtual wall problem, with force proportional to the distance away from the target location. Curved characters are treated differently, with a gradient on the outer surface pushing the pen back into the line, and a particle at the center point of the radius of any curve projecting a force field outward. This does have the problem of the user experiencing the force shutting off when they push outside the gradient range. Even with their problems, the paper’s results (depicted below) after only 15 training sessions speaks for itself.
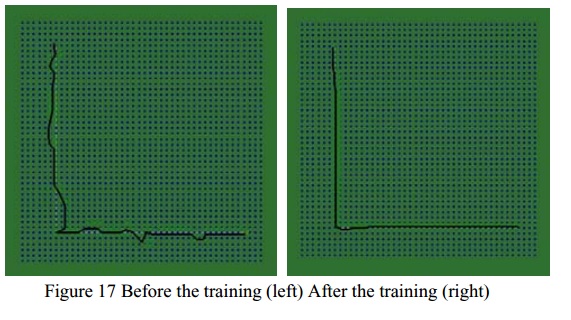
Source: Hand-writing Rehabilitation in the Haptic Virtual Environment by Youn. K. Kim and Xiaoli Yang