Click to make this picture bigger
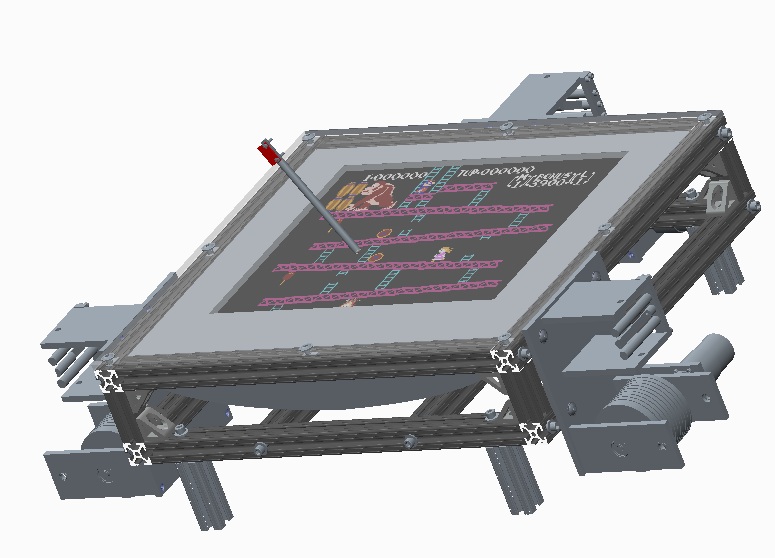
The goal of this project is to provide a medical tool for rehabilitation of fine motor skills; writing and drawing in particular. A robotic device that could recreate a consistent training regimen would be an ideal solution. Several options were considered; ultimately, a cable driven haptic mechanism was chosen. Any planar force can be rendered by three motors pulling cables attached a pen. The pen is kept perpendicular to a screen that will display patterns to draw, etc. This solution has the benefit of being less bulky then glove type or “arm master” designs.
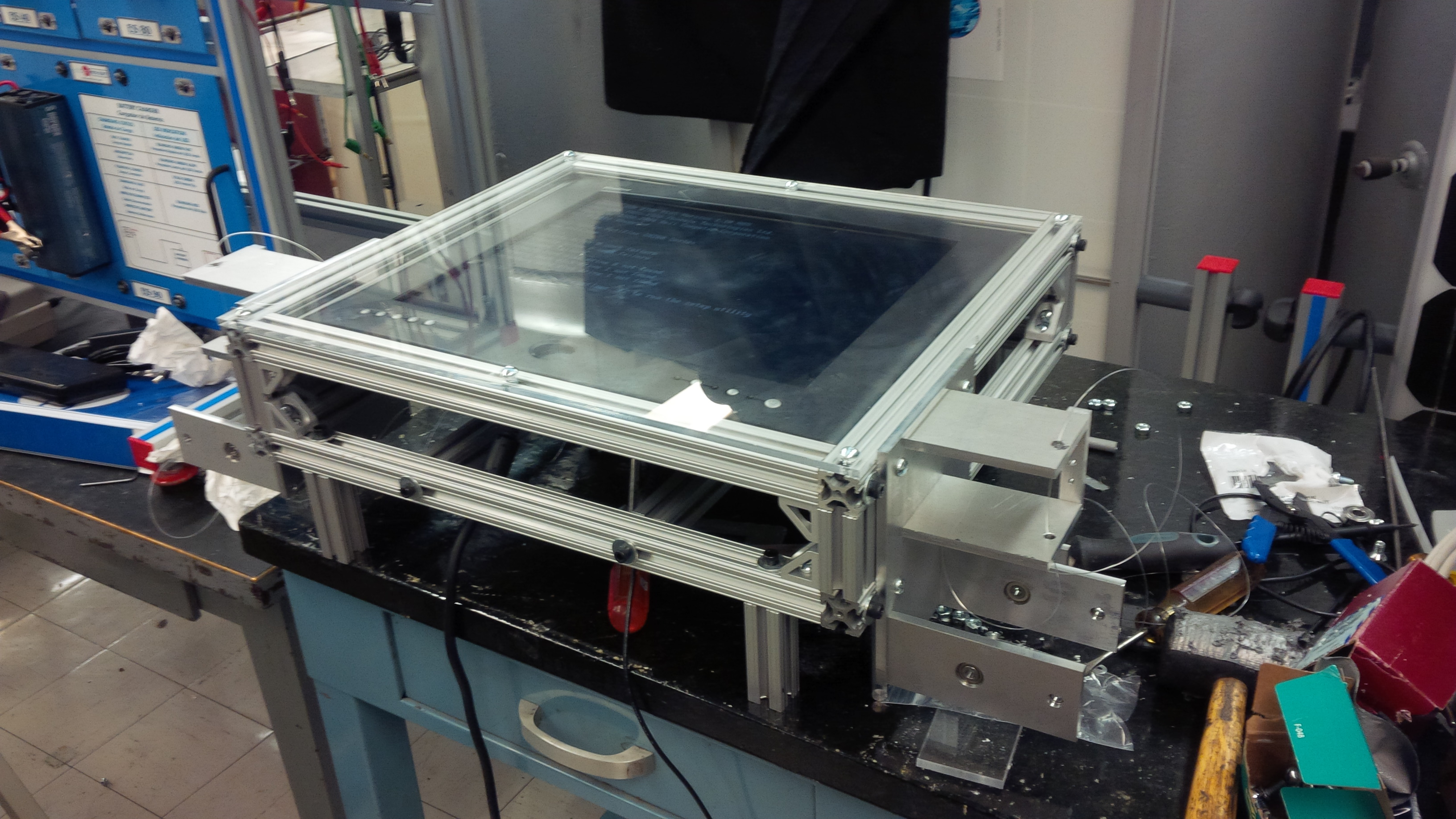
The physical fixture so far, as of 4/14/2014. Click to make bigger.
Rehabilitation requires motion to be performed repetitively and this is why a robot is a good tool to use. The robot can direct and evaluate a patience’s response with little involvement of a trainer. Our device is a planar cable driven robot aimed at recovering fine motor skills in the hand and fingers. Our devices uses three motors with three cables to generate a force equal but opposite to the force exerted on an end effector (pen). This will essentially guide the patients hand along a prescribed path. A shape will be provide on the monitor embedded in the haptic display device and the patient will be tasked to recreate this shape with the help of the cable driven pen.
Here are some cool animations of the device and another of the Motor and Spool Sub-assembly.