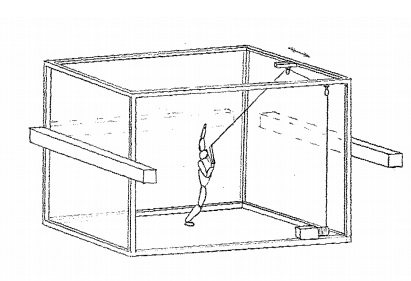
Patent number EP2251767-A1 is another interesting find in our patent search. It has the potential to be an extremely affordable system since it only uses one motor. This makes it viable as a game control for a tennis simulation or rowing simulation, for example. The article kept bringing up the load mass of the system as the driving differentiator, comparing itself to bulkier “arm master” style haptic devices. Another defining feature is user-cooperative control. That is, the user is not “taken for a ride” by the machine but the machine is only active when force needs to be rendered. This adds the constrain of making sure the user does not collide with the cables.
Source: Web of Science
The number of cables needed in the system is mentioned to be a function of not only degrees of freedom, but complexity of the task. More cables are needed to simulate a vase with a lip that constraints the user of they hook it the lip than a vase that has no lip.
The position measurement of the cables is extremely important as it is the only measurement this machine has to find the location of the end effector. To this end, a high resolution encoder in addition to a potentiometer are in this system. The high resolution of the encoder is also necessary to reduce noise when taking the first and second derivatives of position to find velocity and acceleration. It’s interesting that they decided to use a body motion tracking system in addition to the potentiometers. While collision detection with the cables was the primary driver in that decision, collision could be detecting when the encoder counts for multiple cables connected to one point don’t end up computing in an intersection of spheres. Force sensors are added to the system to allow for more refined control outside of position control. This particular device uses a one-roller tensionmeter.
The cable in these systems tend to be steel or synthetic materials. The rope selection “depends mainly on the following parameters: specific weight (kg/m), break load FB (N), work stress (%), minimal bending radius rmin (m), [ease of] tying, damping, and abrasion-resistance”. Typically, the cable is guided into the work space from the spool through some form of hole, however this increases friction. Thus, this device used two roller to allow the cable to leave the spool at a known point.